 OUSD Research and Engineering
OUSD Research and Engineering  West Point
West Point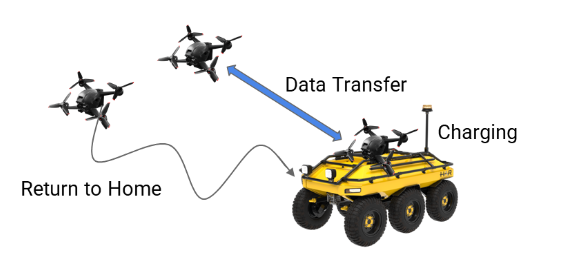
Abstract
The implementation of Unmanned Aerial Vehicles (UAVs) and Unmanned Ground Vehicles (UGVs) in a military unit has provided solutions to mitigating risks taken by soldiers and performing difficult mission sets under hazardous conditions. However, the main difficulty is handling the needs and limitations that come with operating a UAV and UGV without being a liability when conducting difficult military operations. For instance, Small FPV UAVs have a large cognitive load, small payload, and short battery life span, but are aerially agile, while UGV can carry a large payload with a significantly large battery but has limited ground mobility and concealment.
Our solution is to combine the unique capability of UAVs and UGVs into a tightly cooperating system, i.e., UAV/UGV teaming, enabling us to overcome the limitations of individual systems. The integrated UAV/UGV teaming capabilities will enhance the performance of these autonomous systems in hostile and hazardous environments.
Problem Statement
UAV returns to the docking platform, includes
- UAVs and UGVs should be able to locate and travel to each other.
- UAVs land autonomously onto the UGV.
- UAVs charge the battery while landing on UGV.
- UAVs are able to collect data, while UGV uses its large payload to process data.
Proposal
UAV
- Select a UAV model for the project
- Acquire and build a UAV for the project
- Set up the UAV development environment and toolchain
- Download the default autonomous landing algorithm and test run the UAV
- Design and program enhancements to the autonomous landing algorithm for the UAV
- Add IMU sensor to the UAV
UGV
- Acquire and build a UGV prototype for the project
- Design, prototype, and mount a docking platform on the UGV
UAV/UGV Teaming
- Create a shared map environment between UAV and UGV
- Test the UAV's ability to detect a stationed UGV
- Test the communications between the UAV and the UGV
- Test the UAV landing, battery recharging, and data download
Challenges and Unknowns
- Acquire and build the UAV, UGV, and additional sensor devices timely
- Secure resources to prototype a UAV docking station and mount it on the UGV
- Acquire and learn the UAV software development environment and toolchain
- Change the UAV algorithm to detect a stationary UGV, achieve precision landing, recharge the battery, and download data
- Detect obstacles between the UAV and UGV preventing the precision landing